【テクニカルレポート】小惑星探査機「はやぶさ」の開発と成果(中編)……NEC技報
ブロードバンド
その他








「はやぶさ」は、小惑星での観測運用、サンプリング、サンプル持ち帰りのために、通常の人工衛星には無い、「はやぶさ」ミッション固有の装置を搭載しています。これらについて、以下に設計概要を示します。
(1)ランデブー、観測、タッチダウン関連機器
「はやぶさ」がイトカワにランデブーしている期間、地球から見るとイトカワは、太陽を挟んで反対側(外合)に位置しており、地球-太陽-イトカワがほぼ一直線に並んだ位置関係にあります。イトカワの明るい面を観測する必要性から、「はやぶさ」は、地球-太陽-「はやぶさ」-イトカワの順番で並ぶ位置(イトカワ上空)にとどまるよう位置制御(ホームポジションキーピング)を行いました。
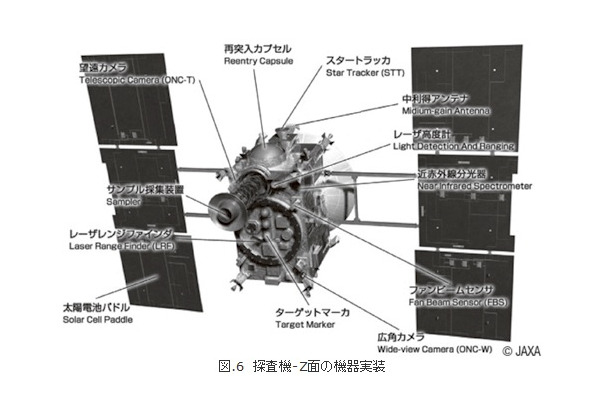
このとき、「はやぶさ」から見ると太陽と地球は+Zにあり、イトカワは-Zにあります。そのため、太陽電池パドルと高利得アンテナは+Z指向とし、小惑星とランデブーするための機器は、-Z面に搭載しました。-Z面に搭載した小惑星滞在時に使用する機器の詳細な搭載状況を図6に示します。
具体的には、ランデブー用の機器としては、小惑星までの距離を測るレーザ測距装置(LIDAR:写真2左)、小惑星表面の地形を詳細に観測するカメラ(ONC-T:写真2右)、小惑星を常に視野にとらえ、小惑星上空の位置保持のための情報を出すカメラ(ONC-W1:写真2中央)を-Z面に搭載しています。
小惑星観測用機器としては、上述のONC-Tの他、小惑星の組成を調べるための近赤外分光機(NIRS:Near Infrared Sensor)、蛍光X線スペクトロメータ(XRS)も-Zに向けて搭載しています。
同様に、タッチダウンのための機器も、障害物センサを除いては、すべて-Z面に搭載しています。
小惑星表面近くまで降下するフェーズでは、上で述べたランデブーのためのカメラや測距装置を主に用いますが、高度100m以下の小惑星表面直近の誘導では、小惑星表面のランドマークとなるターゲットマーカ(TM:写真3)、それを光らせるフラッシュランプ(FLA)を用います。
FLAによりTMを光らせた状態を写真4に示します。
TMを検出するためのカメラは、上述のONC-W1が受け持ちます。また、表面上の4点の距離を測ってイトカワのローカルな表面に対する傾きと距離を計測するためのレーザ測距装置(LRF-S1:写真5左)も、-Z面に搭載しています。
タッチダウン時にサンプリングをするための装置であるサンプル採取装置(SMP)は衛星本体の-Z面から-Z方向に1mの長さで筒状に伸展しており、探査機のなかで最も先に小惑星の表面に接触するため、衝撃を探査機本体に直接伝えないよう、コイルばね構造になっています。タッチダウンタイミングを検出するために、SMPの先端の変形をレーザで常時モニタしている装置(LRF-S2:写真5右)も-Z面に搭載しています。LRF-S2の出力により、小惑星表面破砕用の弾(プロジェクタイル)を発射するタイミングと、探査機が上昇するタイミングが決められます。
タッチダウン時に探査機を傷つける有害な障害物を検出するための障害物センサ(FBS)は、太陽電池パネルの下面をカバーするため±Y面に搭載されています。
(2)再突入カプセル(CPSL)
タッチダウン時にSMPが取得したサンプルを、再突入カプセル内のコンテナに搬送して収納するために、再突入カプセルはSMP取り付け場所の直近で、分離方向に障害物のない-X面に搭載しました。
4.「はやぶさ」の運用実績と成果
「はやぶさ」の運用は、往路のイオンエンジン動力飛行、小惑星へのランデブー、観測、タッチダウンとサンプリング、帰還、再突入というシリーズに行う運用がミッションの骨格でした。これら運用の概要と成果を以下に示します。
(1)イオンエンジン動力飛行とスウィングバイ
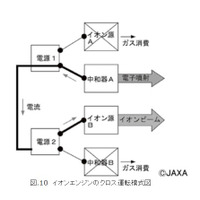
「はやぶさ」は、従来の化学燃料による推進系に比べ、燃料の質量効率が10倍良いマイクロ波放電型イオンエンジンを、惑星間軌道航行用主エンジンとして新たに開発して搭載しました。イオンエンジンは、出せる力は1台8mNと非常に小さいため、時間を掛けて運転し続けることで徐々に軌道を変換していく必要があります。「はやぶさ」は、M-Vロケットで地球とほぼ同じ太陽周回軌道に投入された後、1年間掛けてイオンエンジンによる加速を続けました。
打ち上げ1年後に地球と会合して、地球のそばを通過するとき、地球の引力で大きく軌道を曲げると同時に、一年間の加速で蓄えた軌道エネルギーを軌道方向の増速に有効に変換し、イトカワとほぼ同じ軌道である遠日点約1.4AUの軌道に遷移することに成功しました。
これはEDVEGA(Electric Delta-V Earth Gravity Assist)と呼ばれ、推進力が小さく持続的に加速を続ける必要があるイオンエンジンを、惑星間航行で利用するための有効な軌道変換方式として提案されたものであり、「はやぶさ」はこれを世界で初めて実証し、利用した探査機となりました。
これにより、軽量の探査機で大きな軌道変換を行う有力な深宇宙探査技術を獲得できたといえます。
(2)光学航法の実証とランデブー
「はやぶさ」がイトカワとランデブーするに当たっては、電波による軌道決定だけでは必要な軌道決定精度を得ることが極めて難しいことから、電波による計測と、搭載カメラに写ったイトカワの画像情報を利用する、光学複合航法と呼ばれる軌道決定を実施しました。
この手法により、イトカワに対する位置速度を極めて精密に決定することに成功し、イトカワに対する精密な誘導制御を行って、イトカワ表面から20kmの位置で探査機を相対的に停止させることに成功しました。光学航法用のカメラ画像情報の一例を図7に示します。
(3)イトカワの観測
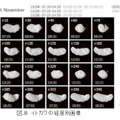
イトカワ表面から20kmの位置(ゲートポジション)及び7kmの位置(ホームポジション)に滞在し、搭載カメラを用いて、自転軸に垂直な全方向から数多くの詳細な表面画像を取得しました。経度ごとの画像例を図8に示します。
このような多数の画像を用いて、イトカワ形状を3Dモデルとしてモデル化することに成功し、タッチダウンが可能な場所の選定やタッチダウンシナリオ検討用のリファレンスとすることができました。また、本モデルはイトカワの密度を決定するための解析にも利用されました。
その他、近赤外分光器(NIRS)、蛍光X線スペクトロメータ(XRS)により、リモートセンシングでイトカワ表面の組成分析が行われて大きな成果が得られました。
ランデブー中の観測では、科学者と技術者が一体となって観測運用や解析に当たり、そこで得られた成果は、Science誌の「はやぶさ」特集号に7本の論文として掲載されました。科学雑誌ではありますが、NECグループの7名の技術者が共著者としてこれら論文成果に貢献することができました。
(4)タッチダウンとサンプリング
イトカワへのタッチダウンに先駆け、2005年の11月4日、11月9日、11月12日の3度にわたる接近降下リハーサルを行いました。一度目のリハーサルにおいて、次の2点の大きな問題が明らかとなりました。
1) イトカワへのランデブーと前後して、3台搭載したリアクションホイールのうちの2台が相次いで故障したため、RCSを姿勢制御に使うことになり、姿勢制御のための噴射がタッチダウンへの誘導に大きな擾乱として漏れ込んだ。
2) イトカワの形状が事前の想定を外れた、いびつな形状で岩石の集合体のような表面だったため、影により星像が2つに分裂したり、想定以上に多数の揮点が現れるなど、誘導制御用カメラの制御能力を超えてしまう事象が発生した。
これらは、リハーサル期間に急遽開発した、イトカワ画像を用いた地上での位置決定ツール及び地上からの誘導制御コマンド生成ツールを用いて、着陸地点上空500mまでの降下の間、地上からの誘導を付加することで解決することができました。
この新方式の誘導制御と、表面近傍の完全自律誘導制御により、11月20日、11月26日に2度にわたる着陸/離陸を行いました。11月20日は、課題であった誘導は非常に精度良く行うことができましたが、タッチダウン直前に障害物センサが障害物検出信号を出して姿勢系自律制御が混乱し、想定外の着陸で30分以上小惑星表面にとどまる事態となりました。地上からの指令により離陸することができましたが次回のタッチダウンでは障害物センサによる自律動作は解除することとなりました。11月26日のタッチダウンにおいては、誘導、着地、離陸ともほぼ想定どおりに実施することができました。2回目のタッチダウン時の誘導の計画パスと実績パスを図9に示します。
タッチダウンの際、サンプリングのために発射する予定であった弾丸発射を行うことはできませんでしたが、タッチダウンの衝撃でサンプラ内に舞い上がった小惑星表面の微粒子を回収することに世界で初めて成功しました。
これは、太陽系の原始的な姿をとどめた小惑星表面の直接的なサンプルであり、太陽系進化の研究に大きく寄与することが期待されます。
■執筆者(敬省略)
・萩野慎二
航空宇宙・防衛事業本部
宇宙システム事業部
シニアマネージャー
※同記事はNECの発行する「NEC技報」の転載記事である。