【宙博2009 Vol.8】多脚、自律走行、ミミズ型、多方向クローラー、etc. ロボットたち
ブロードバンド
その他












JAXA、中央大学、明治大学らが研究しているのは、自律走行が可能な月面探索車だ。JAXAがソーラーパネルや宇宙環境に耐える車両部分を担当し、中央大学はマニピュレータとカメラを使った自律走行システムを担当。明治大学は岩場など不安定な場所でも倒れない6輪の走行制御システムを開発しているそうだ。どこに行くとか、この石を拾うなどの操作はリモートで指示できるが、基本的に月面での走行はカメラの映像などを解析し、ロボット探索車が判断しながら自律走行する。アームは消費電力を抑えるため、超音波モーターを利用しているが、真空の宇宙空間での動作などを研究中だそうだ。明治大学の探索車は、6輪方式となっており、凹凸の激しい地形の走破性を上げるため中心部分にも車輪がついている。
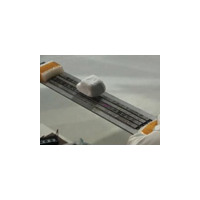
もっと荒れ地の場合は、多脚ロボットが活躍しそうだ。6本の足があり、どの向きになっても移動することが可能だそうだ。「タチコマ」や多脚好きにはたまらないロボットだろう。両端が半球状になった円筒形のクローラー(キャタピラ)がついたロボットもいた。クローラーが前後だけでなく横にも回転するため、真横移動やななめ移動が簡単に行える。通常のキャタピラだと、狭い空間に入っていくときの細かい位置決めが難しいが、このクローラーならその心配はない。また、この形だと、円筒形のパイプの内側、外側を走行することもできるそうだ。本体が入れば、どんな径のパイプでも入っていけるし、内部や外周に凹凸があっても回避できる。
さらに面白いのは、ミミズの蠕動(ぜんどう)運動を模したロボットだ。縦穴や横穴を関節部分を膨らませたり伸ばしたりしながら穴を進んでいく。先端にドリルをつければ、自分で穴を掘りながら進むことも可能だ。ただし、関節部分はミミズのように柔軟に曲がったりしないので、曲がりくねった穴には使えないそうだ。用途としては、無人探索車が月に地震計を埋め込むときなどに使えるそうだ。
最後は、遠隔操作や自律走行のためのシステムとして3次元レーザーセンサーを使ったロボットだ。カメラ映像とレーザーセンサーによって、周辺の地形、そこまでの正確な距離などを立体データとしてマップし、走行ルートを計算する。カメラの画像解析よりも細かい距離が計測でき、対象の形状もより正確に把握できるというものだ。
これらのロボットが月面で活躍する姿をぜひ見てみたいものだ。
関連リンク
関連ニュース
-
 【宙博2009 Vol.7:動画】惑星探査、レスキュー探査を視野に入れた「Omni−Crawler」
【宙博2009 Vol.7:動画】惑星探査、レスキュー探査を視野に入れた「Omni−Crawler」
-
 【宙博2009 Vol.6】なんと!NASA宇宙服は1着約10億円!!
【宙博2009 Vol.6】なんと!NASA宇宙服は1着約10億円!!
-
 【宙博2009 Vol.4】六本木ヒルズはハイテクじゃない!? スマートシティがCO2削減の鍵
【宙博2009 Vol.4】六本木ヒルズはハイテクじゃない!? スマートシティがCO2削減の鍵
-
 【宙博2009 Vol.3:動画】ほんとに浮いてる!超電導実験コーナーに注目
【宙博2009 Vol.3:動画】ほんとに浮いてる!超電導実験コーナーに注目
-
 【宙博2009 Vol.2】超電導ジェットコースターにブラックホールも!?
【宙博2009 Vol.2】超電導ジェットコースターにブラックホールも!?
-
 【宙博2009 Vol.1】スペースシャトルは新幹線みたいな乗りごこち? ——若田飛行士ミッション報告会
【宙博2009 Vol.1】スペースシャトルは新幹線みたいな乗りごこち? ——若田飛行士ミッション報告会
-
 若田氏とスペースシャトルクルーも登場! 都内で宙博(ソラハク)2009 開催
若田氏とスペースシャトルクルーも登場! 都内で宙博(ソラハク)2009 開催
-
 【ビデオニュース】宙博(ソラハク)へ期待!天文・環境への思いを語る
【ビデオニュース】宙博(ソラハク)へ期待!天文・環境への思いを語る
-
 12月に国内初の宇宙・環境エネルギーイベント「宙博」開催
12月に国内初の宇宙・環境エネルギーイベント「宙博」開催
-
 NASA、「アポロ11号40周年記念」でジョン・グレン氏の講演動画など続々公開
NASA、「アポロ11号40周年記念」でジョン・グレン氏の講演動画など続々公開