【CEATEC 2014 Vol.28】慶大のセルフマッサージロボット、微妙な力加減を再現
エンタープライズ
その他
-

10G光回線導入レポ
-

【CEATEC 2014 Vol.27】ルービックキューブを完成させるメガネ――エプソン「MOVERIO」
-
![【CEATEC 2014 Vol.6】オムロンの大型新人「卓球ロボット」……人に優しいセンシング&コントロール技術[動画] 画像](/imgs/p/MpY7t08CC_Ltnb1K5Sea6U1PHkEQQ0JFREdG/426375.jpg)
【CEATEC 2014 Vol.6】オムロンの大型新人「卓球ロボット」……人に優しいセンシング&コントロール技術[動画]
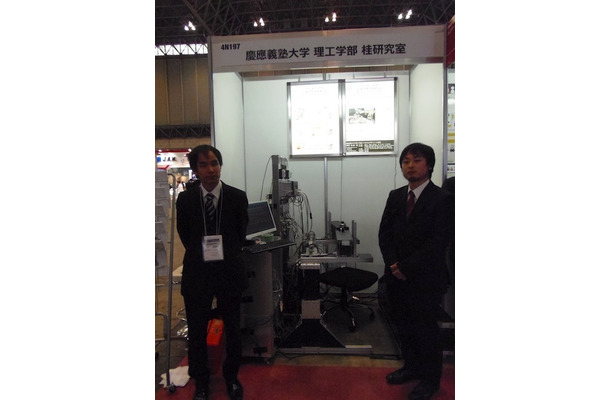



同研究室では、以前より場所にとらわれずに遠隔地から触覚を伝送できる技術を研究してきた。その技術をヘルスケア分野に応用したものが今回のロボットだ。マスター側のアームを操作すると、スレーブ側のアームが同期して動く。いわば高度な「孫の手」のようなイメージだが、単純な動きの再現だけでなく、力覚もフィードバックしているため、ロボットを自分の体のように操りながら、細やかな力加減を伝えられることが大きな特徴だ。
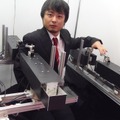
マスター側からスレーブ側に伝えられる力は増幅して出力することも可能だ。またマスター側の1つの動作(1自由度)を、スレーブ側の2つの動作(2自由度)に変換することで、グリップ動作を単純に実現できる。人とロボットの機能をどのように割り当てるのか、ロボット動作をうまく座標変換することで実現したそうだ。コントロールに関しては、加速度制御の理論をベースにしている。制御の対象を力から加速度に変更することで、応答性がよく、ロバスト性に優れたコントロールを可能にした。
インターネット経由で、遠隔地からのオペレーションも行える。たとえば、このロボットをケアセンターや自宅などに設置し、病院から専門医がリハビリをサポートしたり、抽出した動作をデータベース化して、専門技術として応用することで、個人にフィットしたリハビリやマッサージが提供できるなど、従来の概念にとらわれない新しい展開が期待できるという。
関連リンク
関連ニュース
-
 【CEATEC 2014 Vol.27】ルービックキューブを完成させるメガネ――エプソン「MOVERIO」
【CEATEC 2014 Vol.27】ルービックキューブを完成させるメガネ――エプソン「MOVERIO」
-
![【CEATEC 2014 Vol.6】オムロンの大型新人「卓球ロボット」……人に優しいセンシング&コントロール技術[動画] 画像](/imgs/square_medium_large/426375.jpg) 【CEATEC 2014 Vol.6】オムロンの大型新人「卓球ロボット」……人に優しいセンシング&コントロール技術[動画]
【CEATEC 2014 Vol.6】オムロンの大型新人「卓球ロボット」……人に優しいセンシング&コントロール技術[動画]
-
 【CEATEC 2014 Vol.24】「スゴい!」思わず口にしてしまう4K・8Kテレビの臨場感を体験!
【CEATEC 2014 Vol.24】「スゴい!」思わず口にしてしまう4K・8Kテレビの臨場感を体験!
-
 【ギフト・ショー 2014 Vol.3 】お値段180万円!?黄金のマッサージチェア
【ギフト・ショー 2014 Vol.3 】お値段180万円!?黄金のマッサージチェア
-
 KDDI研、複数4K映像のリアルタイム伝送を実現する技術……家庭で4Kマルチアングル
KDDI研、複数4K映像のリアルタイム伝送を実現する技術……家庭で4Kマルチアングル
-
 【物欲乙女日記】たったひとつのクリスマスケーキ……2014年は自分で飾りつけ
【物欲乙女日記】たったひとつのクリスマスケーキ……2014年は自分で飾りつけ
-
 その香りだけが現実……“理想の男”という幻想をリアルにまとえる、ゲランの新作
その香りだけが現実……“理想の男”という幻想をリアルにまとえる、ゲランの新作
-
 書籍や雑誌のお気に入りページでマイアンソロジー……10円単位で買えるパピレスプラス
書籍や雑誌のお気に入りページでマイアンソロジー……10円単位で買えるパピレスプラス
-
 バイク捨てた『仮面ライダードライブ』、「タイヤ交換」で戦う
バイク捨てた『仮面ライダードライブ』、「タイヤ交換」で戦う
-
 “22ママ”に商機……カルビーが油分25%カットのスナック
“22ママ”に商機……カルビーが油分25%カットのスナック