
KiQ Robotics株式会社(所在地: 福岡県北九州市、代表取締役: 滝本 隆)は、ロボットハンドツール「ラティス構造柔軟指」(以下、柔軟指)の導入検討をオンラインで始められるサービス「柔軟指ジェネレータ」を公開しました。柔軟指ジェネレータは、ラティス(格子)構造を用いた柔軟指をブラウザ上で設計し、3D形状、見積価格、納期目安を確認しながら、製造引合へ進めるオンライン設計サービスです。標準品では寸法や把持面が合わない一方で、専用設計に入る前に具体案を作りたいお客様の導入検討を支援します。
https://www.youtube.com/watch?v=ErkYcA17c-g
公開の背景
製造現場のロボット搬送では、多品種ワーク、形状ばらつき、位置ずれ、把持ミス、ワーク傷、チャック爪の段取り替えといった課題が生じます。硬いチャック爪は剛性が高く、決まった形状・位置のワークには有効です。一方で、多品種化や形状ばらつきがある工程では、ワークごとの爪設計・交換、点接触による局所荷重、傷つきやすい表面への負荷が課題として残ります。
KiQ Roboticsは、こうした「最後の接触」の課題に対して、柔軟指を開発・販売してきました。柔軟指は、ラティス構造の柔らかい指先がワーク形状にならって変形し、点接触・線接触ではなく、より広い面接触で把持を支えるロボットハンドツールです。
これまでは、主要メーカのチャック・ロボットハンドに対応した標準品、またはワーク形状や取付条件に合わせたオーダーメイド設計を中心に導入検討を受け付けてきました。一方で、標準品では条件が合わないものの、専用設計相談の前に形状案や価格感を自社で確認したいというニーズがありました。
今回公開した柔軟指ジェネレータは、その中間にある導入検討をオンライン化するサービスです。ユーザは、ブラウザ上で条件を入力し、柔軟指の形状案、見積価格、製造引合までを短い手順で確認できます。
柔軟指ジェネレータでできること
柔軟指ジェネレータでは、ユーザ登録後、ブラウザ上で柔軟指の設計案を作成・保存・再編集できます。設計画面では、左側のパラメータで把持面やラティス条件を調整し、中央の3Dビューアで形状を確認し、右側の見積価格パネルで材料、数量、納期目安を確認できます。
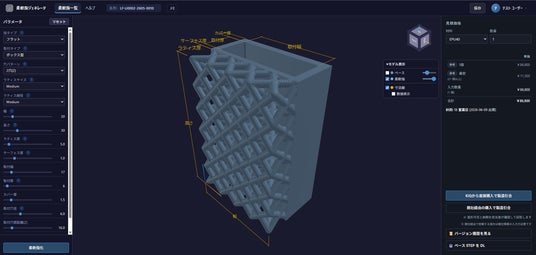
- パラメータ入力による柔軟指設計把持面タイプ、取付形状、幅、高さ、ラティス条件などを入力し、用途に近い柔軟指の形状案を作成できます。
- 3Dビューアによる形状確認生成した形状をブラウザ上で確認できます。ベース形状、柔軟指、寸法線を切り替えながら、社内検討や顧客提案に使う初期案を具体化できます。
- 見積価格・数量・納期目安の確認材料と数量に応じた見積価格、単価、合計、納期目安を画面上で確認できます。標準納期は注文確定後15営業日を目安としています。実際の条件や数量により変動する場合があります。
- 3Dデータの出力確認用の外形3DデータをSTEP形式でダウンロードできます。社内の干渉確認や検討資料作成に活用できます。ラティス化後の3Dデータは、ビューア表示で確認いただくのみで、直接ダウンロードでの提供はしていません。
- 自動バリデーションパラメータの組み合わせが幾何学的に成立するか生成前に自動チェックし、造形不可な設計を未然に防ぎます。
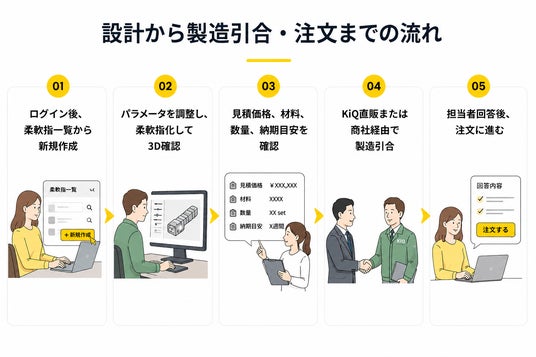
- 製造引合作成した設計案からKiQ直接購入または商社経由の製造引合へ進み、KiQ Roboticsからの回答を受け取ることができます。
4種の把持面からワークに近い形状を検討
柔軟指ジェネレータでは、フラット、V溝、R凹、R凸などの把持面タイプを選び、ワーク形状に近い接触面から検討できます。
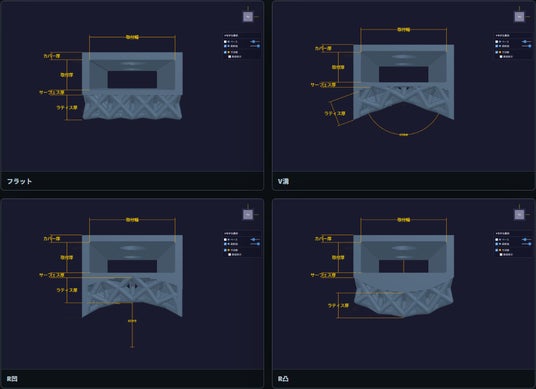
- フラット平面や板状ワーク向けの基本形状
- V溝
円筒や棒状ワークを中央に寄せやすい形状
- R凹丸みのある外形に沿わせる検討に使う形状
- R凸内側から支える、または凹形状に当てる検討に使う形状
画面上で入力できない寸法、特殊な取付条件、実機評価が必要な案件については、製造引合や問い合わせを通じて個別に確認します。
標準品とオーダーメイドの間を埋める設計経路
柔軟指の導入経路は、大きく標準品、柔軟指ジェネレータ、オーダーメイドの3つです。
- 標準品
主要メーカのチャック・ロボットハンドに対応した既成寸法の柔軟指です。対応するチャック・ロボットハンドが決まっており、まず短納期で試したい場合に向いています。
- 柔軟指ジェネレータ標準品では寸法や把持面が合わない場合に、ユーザ自身がブラウザ上で設計案を作り、形状と見積価格を確認する経路です。専用設計に入る前の初期検討や、社内承認、顧客提案の具体化に活用できます。
- オーダーメイド特殊ワーク、特殊な取付条件、実機検証を含む高難度案件に対し、KiQ Roboticsが個別に設計する経路です。
柔軟指ジェネレータは、オーダーメイドを不要にするものではなく、導入検討の初期段階をより具体的に進めるための入口として位置づけています。
柔軟指について
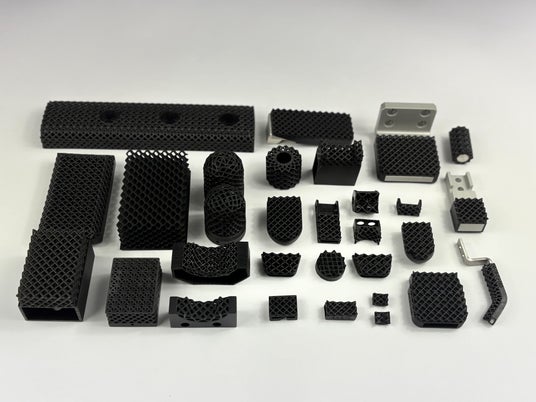
柔軟指は、KiQ Roboticsが開発・販売するロボットハンドツールです。ラティス構造の柔らかい指先がワーク形状にならって変形し、面接触で安定した把持を支えます。
- 多品種ワークを1つの指で扱いやすくし、段取り替えを減らします。
- 対象物の形状差や位置ずれを受け止め、把持を安定させます。
- 硬いチャック爪との直接接触を減らし、ワーク傷の低減を支援します。
- 主要メーカのチャック・ロボットハンドに対応した標準品のほか、ワーク形状や取付条件に合わせたオーダーメイド設計が可能です。
2026年4月時点で、導入実績130件超、導入先50社超、リピート率約3割の実績があります。今後は、標準品、柔軟指ジェネレータ、オーダーメイドを組み合わせ、現場ごとの把持課題に応じた導入経路を広げていきます。
今後の展開
KiQ Roboticsは、柔軟指ジェネレータを通じて、柔軟指の導入検討をより早く、より具体的に始められる環境を提供します。
今後は、対応する把持面や取付条件の拡充、設計支援機能の高度化、見積・製造連携の改善、導入事例や設計データを活かした推奨機能の強化を進める予定です。これにより、標準品と専用設計の間にあるニーズを受け止め、柔軟指の採用拡大と設計知見の蓄積を進めます。
利用開始・お問い合わせ
柔軟指ジェネレータは、ユーザ登録後、ブラウザ上で利用を開始できます。実際の適用可否は、ワーク重量、搬送速度、摩擦、表面状態、取付条件などを確認したうえで判断します。
- 柔軟指ジェネレータ : https://lfgenerator.kiq-robotics.co.jp/
- サービス紹介ページ : https://lfgenerator.kiq-robotics.co.jp/landing/
- コーポレートサイト : https://kiq-robotics.co.jp/
KiQ Roboticsについて
KiQ Roboticsは、福岡県北九州市を拠点とするロボットスタートアップです。ロボットハンドツール「柔軟指」の開発・販売を中心に、製造現場の多品種把持、段取り替え削減、ワーク保護に関する課題解決に取り組んでいます。
- 会社名 : KiQ Robotics株式会社
- 設立 : 2019年4月25日
- 代表者 : 代表取締役 滝本 隆
- 所在地 : 〒802-0001 福岡県北九州市小倉北区浅野1-1-1 ビエラ小倉1階 DISCOVERY
- 事業内容 : ロボットハンドツール「柔軟指」の開発・販売、専用装置の受託開発、ロボット制御・AI関連技術の研究開発
- お問い合わせ : [email protected]
-

企業プレスリリース詳細へ
PRTIMESトップへ