
KiQ Robotics株式会社(所在地: 福岡県北九州市、代表取締役: 滝本 隆)は、ロボットハンドツール「ラティス構造柔軟指」(以下、柔軟指)で培ってきた多品種把持、位置ずれ吸収の知見を活かし、フィジカルAI領域の研究開発に着手しました。公開研究であるUniversal Manipulation Interface(UMI)の可搬データ収集の考え方を土台の一つとしながら、柔軟指による実世界接触の安定化と段階的な実機評価を組み合わせ、産業現場で検証しやすいフィジカルAI基盤の構築を目指します。
https://www.youtube.com/watch?v=lC3YbCE_H7U
フィジカルAI開発に着手する背景
近年、ロボットや機械を通じて現実世界で作業する「フィジカルAI」への関心が高まっています。現場でロボットが対象物を扱うには、認識や動作計画だけでなく、対象物に触れ、掴み、動かす最後の接点が安定していることが重要です。
現場には多品種・少量、位置ずれ、ワーク形状のばらつきといった課題があり、AIが正しく認識しても最後の接触で滑りや把持ミスが起きれば実運用にはつながりません。当社は、こうした「最後の接触」の課題に対し、柔軟指という物理接触インターフェースと、ロボット作業を学習・評価・改善するソフトウェア基盤を組み合わせるフィジカルAI開発に取り組みます。
柔軟指とのシナジー
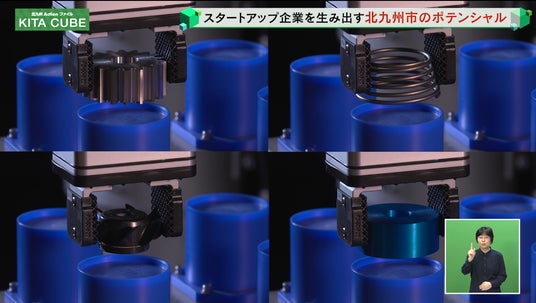
柔軟指は、ラティス(格子)構造の柔らかい指先がワーク形状にならって変形し、面接触で対象物を支えるロボットハンドツールです。多品種ワークの搬送、段取り替え削減、ワーク傷の低減を目的に、製造現場で活用されています。
フィジカルAIで重要なのは、柔軟指が対象物の位置ずれや形状差を物理側で受け止め、AI制御に求められる接触精度の一部を補うことです。当社は、柔軟指をフィジカルAI時代の実世界接点として位置づけ、ロボットが「見て、考えて、動く」だけでなく、現実の対象物に安定して「触れる・掴む」ための接触インターフェースとして発展させていきます。
開発の方向性
公開研究であるUMI(ロボット本体を使わずに人の作業データを収集し、実機へ転移するフレームワーク)の考え方を土台の一つに、柔軟指の接触特性、データ品質管理、段階的な実機評価を組み合わせた開発を進めます。重視するのは以下の3点です。
- 実世界接触の安定化
形状ならい性と面接触で、対象物の位置ずれや形状差を物理側で受け止め、AI制御が最後の接触で破綻しにくい条件づくりを目指します。
- 可搬データ収集とロボット作業学習
ロボット本体を長時間占有せず、現場に近い環境で教師データを集め、対象タスクごとのロボット作業学習と実機評価を進めます。
- データ品質と段階的な実機評価データ品質の確認と、停止・非接触・近接・接触へ進む段階的な実機評価を組み合わせ、現場で検証しやすい開発基盤を整えます。

研究活用事例:九州工業大学
当社の柔軟指は、九州工業大学 田向研究室の人工知能研究で活用されています。同研究室では家庭用サービスロボットによる動作データ収集が進められており、指先の合わせ込みが厳密でなくても、面接触によって対象物を安定して掴みやすい点が評価されています。
AIが認識・判断した後、現実世界に働きかける最後の接点を物理的に支える役割として、フィジカルAIにおける柔軟指の活用事例の一つとなっています。

今後の展望
短期的には、柔軟指が接触時の位置ずれや姿勢ずれをどのように受け止められるかを実機検証の中で確認し、AI制御と組み合わせた場合の作業成立条件に関する知見やノウハウを蓄積していきます。多品種ワーク搬送、位置ずれを含む把持タスク、ワーク傷を避けたい工程を中心に、教師データ収集・学習・実機評価のPoCを進めます。
中長期的には、公開されるロボット基盤モデルや新しい模倣学習手法を比較・活用できるよう、現場データ、評価ゲート、安全確認を組み合わせた基盤づくりを進めます。当社は、柔軟指で培った実世界接触の知見を活かし、産業現場でAIロボットを使いこなすための技術基盤を育てていきます。
柔軟指について
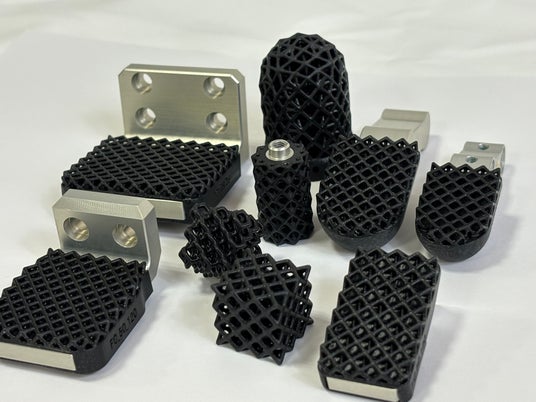
柔軟指は、当社が開発・販売するロボットハンドツールです。ラティス構造の柔らかい指先がワーク形状にならって変形し、面接触で安定把持を支えます。
- 多品種ワークの段取り替え削減
- 形状差や位置ずれの吸収による把持安定化
- 硬いチャック爪との直接接触によるワーク傷の低減
- 標準品とオーダーメイド設計の両対応
2026年4月時点で導入実績130件超、導入先50社超、リピート率約3割の実績があります。今後は、製造現場の把持課題に加え、フィジカルAI領域における接触インターフェースとしても展開を進めます。
共同実証・お問い合わせ
当社では、柔軟指を活用したフィジカルAI実証、把持テスト、教師データ収集、AI制御実証、実機評価のご相談を受け付けています。現場課題に応じて検証テーマを設計します。
- お問い合わせ : [email protected]
- コーポレートサイト : https://kiq-robotics.co.jp/
会社概要
当社は、福岡県北九州市を拠点とするロボットスタートアップです。ロボットハンドツール「柔軟指」の開発・販売を中心に、製造現場の多品種把持、段取り替え削減、ワーク保護に関する課題解決に取り組んでいます。
- 会社名 : KiQ Robotics株式会社
- 設立 : 2019年4月25日
- 代表者 : 代表取締役 滝本 隆
- 所在地 : 〒802-0001 福岡県北九州市小倉北区浅野1-1-1 ビエラ小倉1階 DISCOVERY
- 事業内容 : ロボットハンドツール「柔軟指」の開発・販売、専用装置の受託開発、ロボット制御・AI関連技術の研究開発
参考リンク
- Universal Manipulation Interface(UMI):https://umi-gripper.github.io/

企業プレスリリース詳細へ
PRTIMESトップへ