日立とヤンマー、自律走行型ロボットトラクターを用いた無人農作業に成功
エンタープライズ
ソフトウェア・サービス





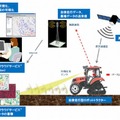

総務省が実施する「海外における準天頂衛星システムの高度測位信号の利用に係る電波の有効利用に関する調査」の委託を受け、衛星システムから配信される信号を、オーストラリアにおける精密農業に利活用する調査を行った。具体的には、自律走行型ロボットトラクターを制御し、実際の農作業を行う実証実験を実施した。
従来のGPS衛星から測位データを直接受信する精密単独測位方式(PPP方式)の測位精度は、約10~20cmが限界だった。実験では、オーストラリアの電子基準点を使用した、新しい精密単独測位方式(PPP-AR方式)を適用することで測位精度を高め、誤差5cmの精度で農作業ができることをめざし、これに成功したとのこと。
今後は、稲の生育状況を自律走行型ロボットトラクターで計測するなど、複数の農作業を時期を変えて行い、本調査を推進、他事業への応用や、オーストラリア以外の日本やアジアへの展開も検討していく。