箱の中のねじの向きや長さを認識——セル生産ロボット向け小型3次元ビジョンセンサーと認識技術
エンタープライズ
その他
-

10G光回線導入レポ
-

コグニティブ無線端末機など、移動通信に関する最先端技術を実証実験で公開〜横須賀リサーチパーク
-

三菱、−5度〜90度で動作可能な10/8Gbps SFP+向けレセプタクル形半導体レーザーモジュール
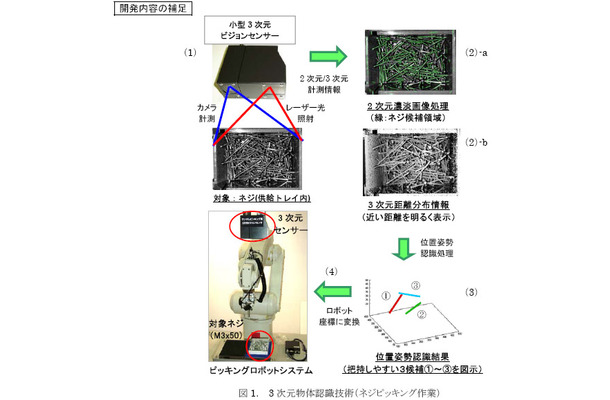


セル生産方式向けのロボットは、作業手順や部品の変更が少ないライン生産方式のロボットと異なり、生産品目に応じて多種多様な部品を取り扱うため、部品を整列した専用パレットや部品供給装置を極力用いずに使用できることなどが望まれる。例えば、バラ積みされたネジを摘むには、ネジの位置のみならず向きまでも認識して、ロボットに指示する高性能な3次元認識装置が必要となる。
三菱電機では、3次元計測用のパターンを照射するレーザー投光部と、それを撮影するカメラ部をコンパクトにまとめる技術を開発し、約800gと軽量で、可搬質量が3kg程度の小型産業用ロボットにも取り付け可能な「小型3次元ビジョンセンサー」を開発した。また、カメラ周辺部の複数のLED光源を順次点灯させて撮影した画像も解析することにより、輪郭部分の物理的な段差の有無が検出できるマルチフラッシュカメラも同時に開発した。さらに、これらの2次元画像情報と3次元距離情報を同時に取得・組み合わせて処理する、高速かつ高精度の「3次元物体認識技術」も開発した。30cmの距離で認識した際の平均距離誤差は±0.6mm、認識処理時間0.15秒を実現したとのこと。
これにより、レーザー光で計測用パターンを照射するのと同期してカメラ撮影を行い、2次元濃淡画像を計算しネジのピッキング候補の領域を抽出、さらに3次元距離情報を計算し、部品の位置と方向を3次元位置姿勢認識処理で算出し、候補領域に順位をつけピッキング作業を行うという動作が可能となった。
関連ニュース
-
 コグニティブ無線端末機など、移動通信に関する最先端技術を実証実験で公開〜横須賀リサーチパーク
コグニティブ無線端末機など、移動通信に関する最先端技術を実証実験で公開〜横須賀リサーチパーク
-
 三菱、−5度〜90度で動作可能な10/8Gbps SFP+向けレセプタクル形半導体レーザーモジュール
三菱、−5度〜90度で動作可能な10/8Gbps SFP+向けレセプタクル形半導体レーザーモジュール
-
 日立、NECら7組織、DLNAやZigBeeなど情報家電技術の開発成果を公開するカンファレンスを秋葉原で開催
日立、NECら7組織、DLNAやZigBeeなど情報家電技術の開発成果を公開するカンファレンスを秋葉原で開催
-
 【増田タワシの価格ウォッチ】最近、部屋が乾燥してませんか?加湿器の価格を調査!(データ編)
【増田タワシの価格ウォッチ】最近、部屋が乾燥してませんか?加湿器の価格を調査!(データ編)
-
 三菱、6.5型のTFT液晶モジュール発売〜業界最長の寿命6万時間を実現
三菱、6.5型のTFT液晶モジュール発売〜業界最長の寿命6万時間を実現
-
 au携帯でドコモ・SBのメニューが利用可能に〜「メインメニュー着せ替えサービス」がスタート
au携帯でドコモ・SBのメニューが利用可能に〜「メインメニュー着せ替えサービス」がスタート
-
 富士通、ドコモ3G携帯電話向け低消費電力 電源/オーディオワンチップLSI
富士通、ドコモ3G携帯電話向け低消費電力 電源/オーディオワンチップLSI
-
 三菱電機、スーパーワイドバンドギャップ半導体による次々世代高周波トランジスターを開発
三菱電機、スーパーワイドバンドギャップ半導体による次々世代高周波トランジスターを開発








