![[CRL一般公開]IPを用いた遠隔操作の通信回線は非常にシビア。IPコントロールカーとじゃんけんロボット](/imgs/p/RqJIzsl7cmxG8-cARbeaqilNLEDQQ0JFREdG/1086.jpg)
![[CRL一般公開]IPを用いた遠隔操作の通信回線は非常にシビア。IPコントロールカーとじゃんけんロボット](/imgs/p/K1b6_Il35dGfahQhrBXkj01PNkE4QkJFREdG/1086.jpg)
![[CRL一般公開]IPを用いた遠隔操作の通信回線は非常にシビア。IPコントロールカーとじゃんけんロボット](/imgs/p/K1b6_Il35dGfahQhrBXkj01PNkE4QkJFREdG/1087.jpg)
IPコントロールカーとは、通常のラジコンカーにカメラと制御系統が搭載されており、これらをIEEE 802.11bを経由して遠隔操作するというもの。
今回使われたIPコントロールカーだが、これまでのものとは違い前後にカメラが付けられている。また、制御に利用している組み込みOSと映像のエンコーディング処理の簡素化が図られているのだ。この結果、IPコントロールカーでの処理の遅延はほとんどなくなっているという。
これらの改良を施した上で、今回は韓国で遠隔操作したIPコントロールカーと東京のCRLから操作したIPコントロールカーを競争させるデモンストレーションが行われた。
しかし、日本と韓国で2,000kmも離れていることもあり、遅延はもちろんのこと制御が途切れる場面がたびたびあった。先に述べたように処理系における遅延はなくなっているものの、伝送路での遅延は0.2〜0.3秒ほどあるとのことだ。
 |
| 1番が日本で、2番は韓国。韓国側の車は時々コントロールが途切れていた。やはりIPで遠隔操作はまだまだ課題が多いようだ |
また別の部屋では、ロボットとのじゃんけんが行われていた。
通常は京都のけいはんな研究所とCRLを結んで遠隔操作を行っているというのだが、今回は同じ部屋で行われた。このロボットは、3次元グローブをはめて手を動かすことで操作でき、さらにこのグローブにロボットの感覚が伝わるのだ。そのため、遠隔地のロボットを操作して物をつかむこともが可能になる。また、通常のカメラだと遠近感が得られないため、ロボットには人間の目と同じようにカメラが2つ設置されており立体的な映像が確認できるのだ。
ここでは、見学者とロボットでじゃんけんが行われていた。ロボットを操作する人は、カメラを見ながら「じゃんけんぽん」のかけ声と同時にグーチョキパーを出すのだが、見学者の小学生は「あと出しだぁ」と言っていた。一見するとスムーズに動いているようだが、じゃんけんとなると今まで以上に遅延をなくさないと無理なようだ。
 |
これまで指が自由自在に動くロボットは数々登場していた。しかしこれは、IPでコントロールされているため、理論上はどんなに離れた場所からでも操作できることになる。指の動きが思ったよりスムーズだ。この華麗な動きは動画でチェック【MPEG1/約3.6Mバイト/10秒】 |
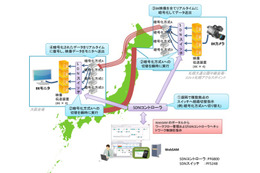
IPコントロールカーで利用されたネットワークは、日本国内に設置された研究用のギガビットネットワーク「JGN」と韓国先進研究ネットワーク「KOREN」を海底ケーブルで接続されたものが使われているため、ある程度閉じられた環境になっている。また、じゃんけんロボットの遠隔操作は同じ部屋から行われている。
この2つを見る限りでは、インターネット経由の遠隔操作の技術はある程度完成しているようだ。しかし、通信回線における遅延の低減や安定性の向上についてはまだまだ改良の余地がありそうだ。CRLでも次なる課題として取り組んでいるという。