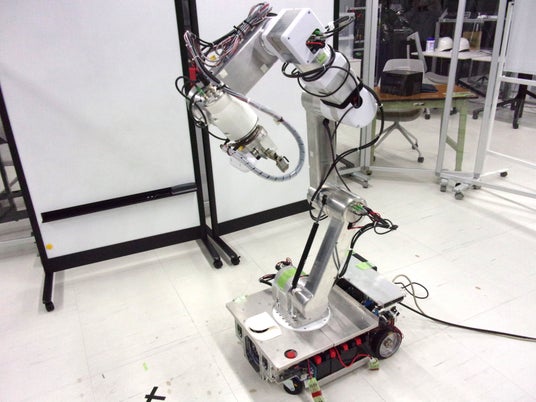
ラボオートメーションの技術を備えた「モバイルマニピュレータ」
ラボオートメーションとは、創薬をはじめとするラボでの研究のうち、実験の準備や片付け、試薬・実験機器・設備の操作、データ収集など、これまで自動化が難しかった一連の非定型な作業を次世代ロボットで自動化し、研究員がより創造的な活動に時間を費やせるようにすることを指します。今回は、以下に関する要素技術の研究論文7件を、国内最大級の学術会議である「日本ロボット学会」にて発表します。
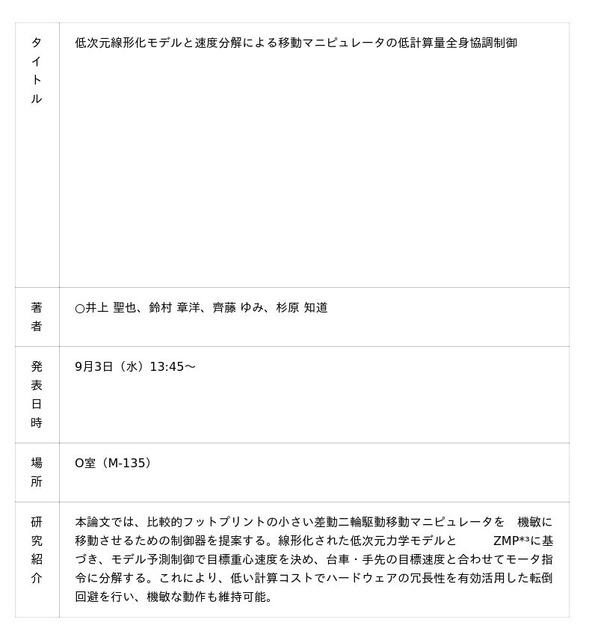
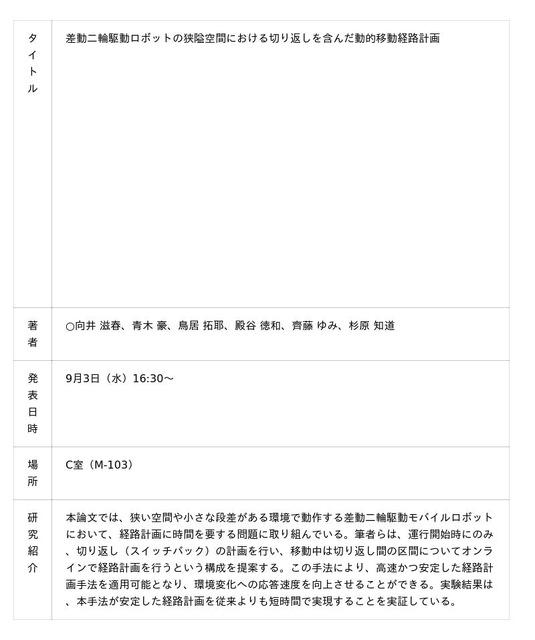
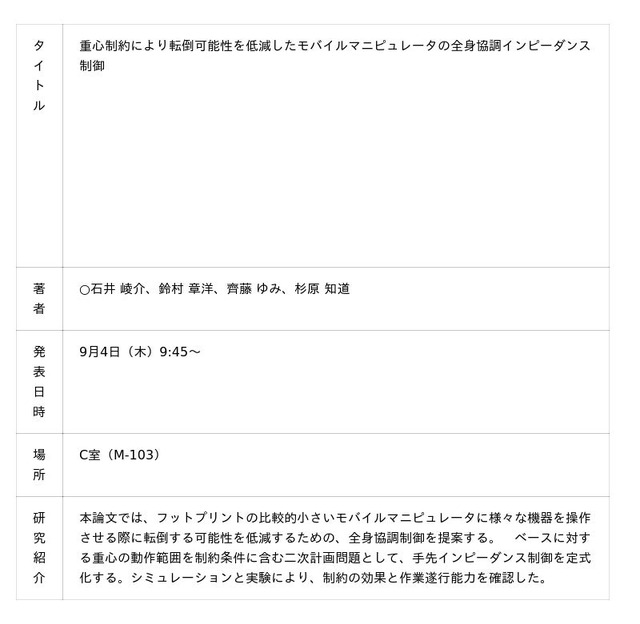
・ 「モバイルマニピュレータ」が、研究室のような狭い通路でも自由に移動可能になる技術
・ 「ワークベンチロボット」が、位置誤差に柔軟に対応し、安定した作業を行える技術
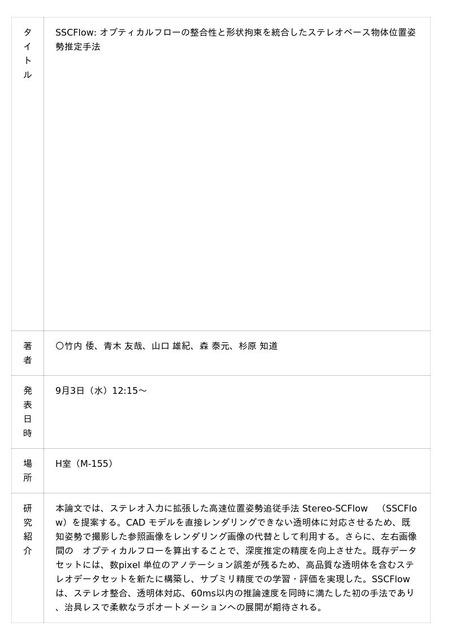
・ フラスコ等の透明なラボウェアを認識できる技術
オムロンは、今後も、自社が得意とするコア技術「センシング&コントロール+Think」*²の追究によって、機械が人の能力を最大限に引き出す世界、“人と機械の融和”を実現してまいります。
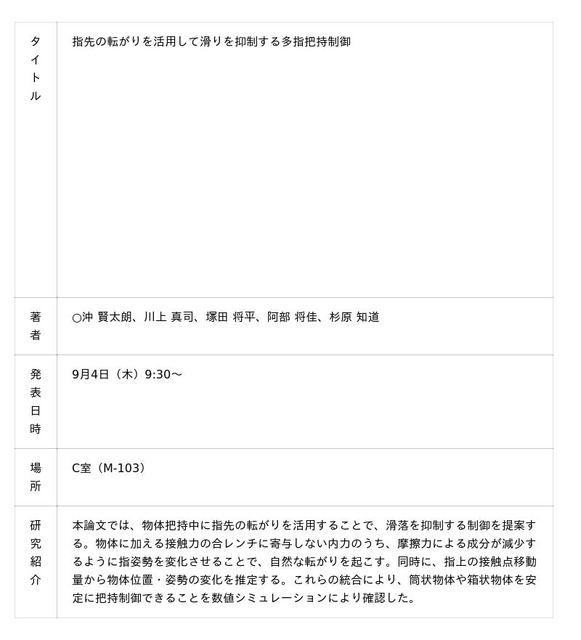
なお、今回の学術講演会では、ラボオートメーションの技術に加えて、ロボットの柔軟な関節動作に関する技術論文も発表いたします。
概要
■学会名
第43回 日本ロボット学会 学術講演会■開催期間・場所
開催期間: 2025年9月2日(火)~5日(金)(オムロンの発表は3日(水)~5日(金))場所: 東京科学大学大岡山キャンパス(東京都目黒区)
■発表内容
※著者のうち、〇印のついている人が発表者<ラボオートメーションに関する発表:7件>
1) 「モバイルマニピュレータ」が、研究室のような狭い通路でも、自由に移動可能になる技術
*³ ZMP(Zero Moment Point):ロボットに作用する重力と慣性力の合力が足裏と地面の接地面と交わる点
2) 「ワークベンチロボット」が、位置誤差に柔軟に対応し、安定した作業を行える技術
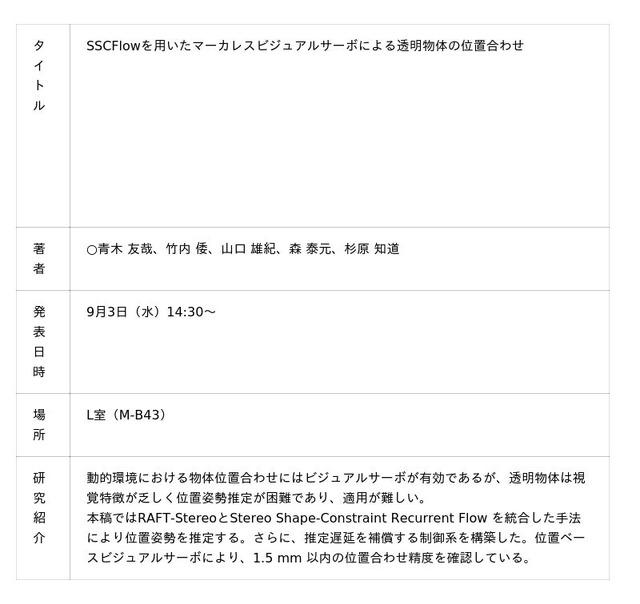
3) フラスコ等の透明なラボウェアを認識できる技術 ※両ロボット共通
<ロボットの柔軟な関節動作に関する発表:2件>

*⁴ NURBUS:曲線や局面を表現するための数学的手法
<参考リンク>
中外製薬とオムロン、オムロン サイニックエックスが目指す人が活きる「次世代ラボオートメーション」 | We are Shaping the Future! 私たちが手繰り寄せる未来ストーリー | オムロン株式会社
https://www.omron.com/jp/ja/edge-link/news/688.html
OMRON_TECHNICS_169.pdf 106~115ページ
https://www.omron.com/jp/ja/technology/omrontechnics/2025/OMRON_TECHNICS_169.pdf
第43回 日本ロボット学会学術講演会
https://ac.rsj-web.org/2025/
<オムロン株式会社について>
オムロン株式会社は、独自のコア技術「センシング&コントロール+Think」を中核としたオートメーションのリーディングカンパニーとして、制御機器、ヘルスケア、社会システム、電子部品、そしてこれらの事業をつうじて取得した多種多様なデータを活用した データソリューション事業を展開しています。1933年に創業したオムロンは、現在では全世界で約2.7万人の社員を擁し、130ヶ国以上で商品・サービスを提供し、よりよい社会づくりに貢献しています。詳細については、https://www.omron.com/jp/ja/ をご参照ください。
<技術・知財本部について>
オムロングループのコーポレートR&D部門として、コア技術である「センシング&コントロール+Think」を進化させながら、近未来に起こりうる社会的課題を先取りし、それらを解決するソーシャルニーズの創造に取り組んでいます。創業者の経営理念「機械にできることは機械に任せ、人間はより創造的な分野で活動を楽しむべきである」を拠り所に、人の可能性を広げ、人がもっと活躍できる未来の実現を目指し、ロボティクス、センシング、パワーエレクトロニクス、AI・データ解析などさまざまな研究開発活動をおこなっています。詳細については、https://www.omron.com/jp/ja/technologyをご参照ください。
企業プレスリリース詳細へ
PRTIMESトップへ