瓦礫の中から声を聞き取り救助者を発見!官学連携のヘビ型ロボット
IT・デジタル
その他
-

コスパ最強の“手のひらサイズ”ミニPC「GT13 Pro 2025 Edition」「A5 2025 Edition」がGEEKOMから登場!
-

崩落現場で被災者捜索を担うワーム型ロボットの実証実験を開始……NEDO
-

人工知能を搭載したドローンで遭難者を探索! 富士山麓で実証実験





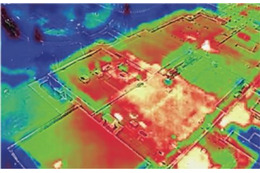
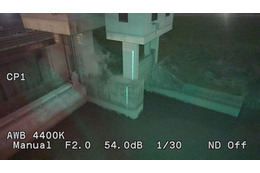
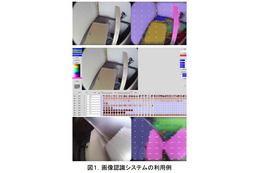
「能動スコープカメラ」は、瓦礫や配管などへの進入を可能とした索状ロボットで、内視鏡の表面に分布型振動駆動のためのアクチュエータを搭載している。索状ロボットは福島第一原発建屋内の調査にも使用が検討されるなど、設備探索などについては各所で実績がある。
しかし要救助者の探索に用いるために、索状ロボットに複数のマイクを装着した場合、走行雑音の問題、ロボットの移動に合わせてマイク配置が変更されることによるマイクアレイ処理で性能が出ない問題、瓦礫によるマイク音量変化など、技術的な問題が複数存在していた。
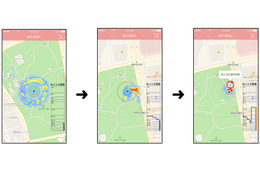
今回の研究では能動スコープカメラの構造を柔軟チューブに変更し、多数のマイクを一定間隔で搭載して瓦礫内に分布させることで、要救助者の音声を位置情報も含めて取得できるシステムを構築している。ほぼリアルタイムでの音声抽出と、オフライン処理による高精度な音声強調を併用して、被災者の音声を明瞭化して、探索を可能としている。
プロジェクトは東北大学田所諭教授、昆陽雅司准教授、早稲田大学奥乃博教授、京都大学糸山克寿教授、坂東宜昭特別研究員、東京大学猿渡洋教授、筑波大学牧野昭二教授、国立情報学研究所小野順貴准教授のグループで構成されており、今後は災害救助システムの実用化に向けて探索性能の向上を図っていくという。