オリエンタル白石株式会社(本社:東京都江東区、代表取締役社長:大野 達也、以下「オリエンタル白石」)は、建設工事現場や工場における生産性向上やウェルビーイング実現のためのロボット適用性評価の一環として、吊り足場(注1)上で巡回業務を行うための四足歩行ロボット稼働試験(以下「本試験」)を2025年10月に実施しました。本試験により、障害物や細かな段差がある吊り足場上で四足歩行ロボットが自律歩行できることを確認しました。今後はロボットの自動巡回、および巡回中の体調不良者検知などの実現を目指します。

ロボットが吊りチェーンの間を通る様子
橋梁や高速道路などの工事では、高所かつ巨大な建造物の工事となるため、吊り足場が多く使われています。吊り足場環境は、工事現場によっては数百メートルから数キロメートルに及び、また天井が低く、床材と構造物を繋ぐチェーンやワイヤーが一定間隔で設置されていることなどから見通しが悪くなっています。定点カメラなどでは、作業者の体調の変化など、全ての状況を把握することは困難であるため、作業中の安全を確認する巡視が不可欠です。
本試験は実際に稼働している工事現場の吊り足場上で実施しました。吊り足場全般の特徴として、一枚の大きな床材ではなく、細かい床材の集合であるため軽微な段差が多く存在すること、また床材と構造物を繋ぐチェーンやワイヤーなど、LiDAR(注2)で検知しにくい障害物があることが課題でした。本試験ではUnitree Robotics社の「Go2」という四足歩行ロボットにオリエンタル白石がプログラミングをしたシステムを用いて、以下の点を検証しました。
1. 障害物の認識と回避
従来LiDARで検知しにくかった細い吊りチェーンを障害物として正確に認識し、接触することなく自律歩行をすることに成功しました。
2. 悪路での安定歩行
細かな段差が多数存在する床面でも、バランスを崩すことなく安定して歩行できることを確認しました。
試験の結果、障害物や段差が多く、見通しの悪い吊り足場上でもロボットが安全に巡回できることが確認できました。今後は、本試験の結果をもとに工事現場や工場における作業者の体調管理や、夏場の熱中症対策として体調不良者を検知するなど、ウェルビーイングの向上に向けて取り組みを進めていく予定です。
オリエンタル白石は、今後も作業者が安全に安心して働くことのできる労働環境の実現を目指し、技術開発やDX化の取組みを推進してまいります。

実証で使用した吊り足場環境
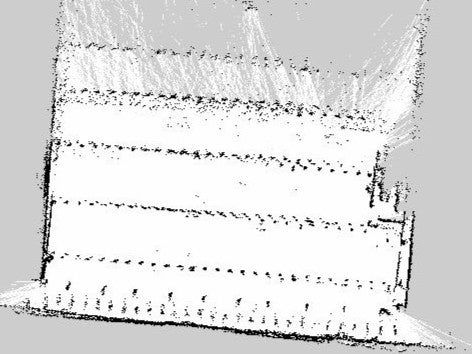
ロボットがLiDARで認識した環境
●使用ロボットの概要
機体名 :Go2(Unitree Robotics社)
寸法 :W 31cm×H 40cm×L 70cm
連続稼働時間 :約2時間
●吊り足場上での四足歩行ロボット自動操縦の様子
https://www.youtube.com/watch?v=wg3bvWKwvyc
※動画内では試験中のためLANケーブルを繋いでいますが、無線LANでの稼働も可能です。
●担当者の声
【開発担当者】
建設現場特有の過酷な環境下で、安全な自律歩行を実現することが最大の挑戦でした。特に吊りチェーンは、形状が細く認識が困難であり、設置間隔が狭いことから自律歩行は試行錯誤の連続でした。周囲の皆様のサポートと期待の声が大きな支えとなったと感じております。この技術を活かし、厳しい環境で働く作業員の方々のウェルビーイング向上を目指します。
【現場担当者】
この取り組みには新常識として大きな可能性を感じています。
建設現場の安全を守るうえで重要であり、心のこもった「声掛け」や雰囲気をつかんだ鋭い「気づき」は人間にしかできないことだと思っています。しかし、作業員の体調の急な変化などロボットが検知してくれるとより迅速な対応が取れます。ロボットが人間をサポートしてくれるので、これにより工事現場の安全を高めていきたいと考えています。開発が進み、この小さな相棒と一緒に仕事ができる日を楽しみにしています。
●参考 オリエンタル白石 その他DX化の取り組み
【ニューマチックケーソン工法の超遠隔操作】
オリエンタル白石の特化技術であるニューマチックケーソン工法(注3)では、作業室内が高気圧空間に保たれているため、作業員が室内で作業できる時間に制約があります。
従来より、工事現場に存在する遠隔操縦室で作業室内にあるショベルを操縦していましたが、工事現場外の遠方から光回線を利用して作業を行う「超遠隔操縦」の実証試験を行っています。
超遠隔操縦により作業員の労働環境改善と作業員確保への効果を期待しています。
【AR締固め管理システム(令和5年度プレストレストコンクリート工学会賞 技術開発賞 受賞)】
コンクリートの打込み作業(注4)は構造物の品質を確保する上で重要な作業ですが、その品質は締固め(注5)を行う作業者の技量に依存しているような状況でした。そこでスマートフォンなどのデバイスを使用し、締固め情報の記録と複数人の情報をAR技術で可視化できるシステムを開発しました。
この技術により、締固め作業をリアルタイムに数値管理できます。
(注1)吊り足場
構造物の上から吊り下げる形で設置する仮設の作業床。
(注2)LiDAR(Light Detection and Ranging, Laser Imaging Detection and Ranging)
レーザー光を照射し、反射して戻ってくる光の時間や角度を計測することで、物体までの距離や形状を正確に分析する技術
(注3)ニューマチックケーソン工法
地上で鉄筋コンクリート製の函(躯体)を構築し、躯体下部にある作業室に地下水圧に見合った圧縮空気を送り込むことで地下水の侵入をふせぎながら、躯体を沈下させることで地下に穴を掘り進める工法。
(注4)打込み作業
生コンクリート(固まっていないコンクリート)を枠の中に流し込む作業。
(注5)締固め
コンクリートの打ち込みの際に巻き込んだ気泡や水分などを除去し、型枠の隅々までコンクリートを移動させる行為。
企業プレスリリース詳細へ
PRTIMESトップへ