川崎重工業株式会社、NTTビジネスソリューションズ株式会社、株式会社ダイヘン、株式会社FingerVision、株式会社安川電機、ヤマハ発動機株式会社、ugo株式会社は、NEDO (国立研究開発法人新エネルギー・産業技術総合開発機構)が公募した委託事業である「ポスト5G情報通信システム基盤強化研究開発事業/ロボティクス分野におけるソフトウェア開発基盤構築」に対し、「SI効率化と多彩なロボットシステムの創出を実現する共創基盤開発」を提案し、採択されました。本プロジェクトの研究開発期間は、2025~2027年度を予定しています。
(NEDO事業採択に関する参考URL:https://www.nedo.go.jp/koubo/CD3_100400.html)
国内において少子高齢化に伴う慢性的な労働人口の減少が社会課題となっており、様々な領域での産業用ロボットやサービスロボットの活用が進んでいます。一方で、ロボットの導入に対する大きな期待があるにもかかわらず、導入コストや技術難易度などを理由に、導入が進まない未活用領域(ロングテール市場)が存在します。
本事業では、ロボット分野やIT分野における豊富な経験と技術力を有し、幅広く事業を展開する7社が共同して、ロングテール市場でのロボット導入促進を実現する「ロボットの機種や適用に関わらず使用できる共創基盤」と「ステークホルダーが集まるコミュニティでロボット導入・運用を支援できるエコシステム」の構築をめざしていきます。加えて、実際のロングテール市場を対象に、共創基盤とエコシステムを活用したロボット導入・運用の実証を行う予定です。
本事業を通じて、実用に耐えうる「共創基盤」と「エコシステム」を構築し、国内外のロボットメーカー、システムインテグレーター、アプリ開発者等のロボットに関わるステークホルダーへの提供を通じて、共創環境の実現を目指していきます。これにより、ロボット業界が一丸となり、様々な分野におけるロボット導入を加速させ、労働人口減少という大きな社会課題の解決に貢献していきます。
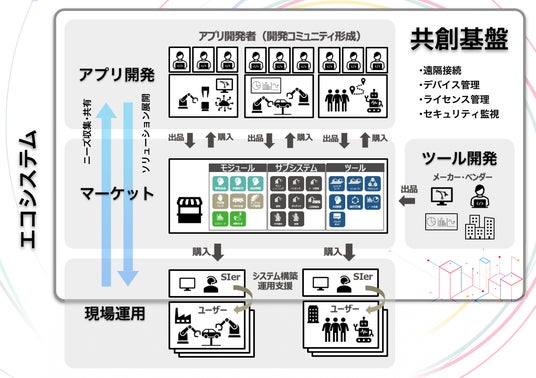
本事業で構築をめざす「共創基盤」と「エコシステム」のイメージ
本事業の主なポイント
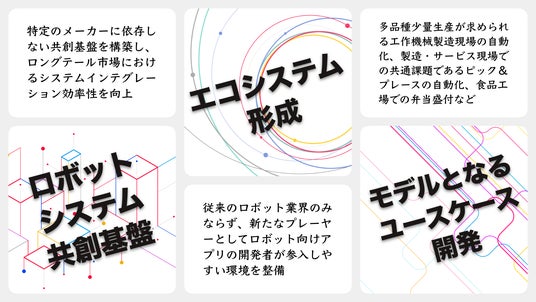
1)特定のメーカーに依存しない「共創基盤」の構築
a.ロボットの機種・適用に関係なく利用できる「共創基盤」を構築し、ロボットシステムインテグレーションに係るツール・モジュール・サブシステムを統合するインタフェースを提供します。b.「共創基盤」を活用して、安定的かつ安全に利用できるロボットシステムの高い信頼性を確保するとともに、コストや効率性に優れたツールやアプリを活用した遠隔対応手法を開発します。これにより、システムインテグレーション効率を向上することで、ロングテール市場のロボット導入を後押しします。
2)様々なステークホルダーが参加する「エコシステム」の形成
a.ロボット業界をはじめとした様々なステークホルダーの参加を促進するため、情報連携や分業体制に係るルールや仕組みを作り、エコシステムの形成活動を行います。b.モジュール開発を担う新たなプレーヤーであるロボット向けアプリの開発者が参入しやすい環境を整備します。
3) モデルとなる「ユースケース」の開発
a.ロングテール市場でのモデルとなるユースケースへのロボット導入を通じて、「共創基盤」における新しいシステムインテグレーションを実現するツール・モジュールを実証します。b.ユースケースとして、多品種少量生産が求められる工作機械製造現場の自動化、製造・サービス現場での共通課題であるピック&プレースの自動化、食品工場での弁当盛付(ロボット適用が難しい柔軟物の取扱い作業)などを想定しています。
参加各社コメント

(川崎重工業株式会社 執行役員 ロボットディビジョン長 坂東賢二)
このたび、私たちの提案がNEDO事業として採択されたことを大変光栄に思います。当社ロボットディビジョンのパーパス「ロボットと生きる 喜び豊かな未来をささえる」の実現に向け、今回の採択は大きな一歩です。研究開発を通じて、ロングテール市場を中心とした現場の課題に寄り添いながら、技術の社会実装を加速させ、持続可能な未来づくりに貢献してまいります。パートナーの各企業と連携し、ロボット産業における革新を生み出していきます。
(NTTビジネスソリューションズ株式会社 取締役・バリューデザイン部長 中西孝一)
このたび、当社が参画する提案が採択された事を大変光栄に思います。NTT西日本グループは、IOWN構想をはじめとする高速・大容量・低遅延な通信基盤と、ロボットを活用したサービス提供の実績に基づき、地域に密着した多様なロボットの協調動作を支える環境整備に貢献してまいります。今後ますます深刻化する人材不足という社会課題に対し、あらゆる産業分野でのDX推進を加速するべく、本事業を通じた技術開発と社会実装を着実に進めてまいります。
(株式会社ダイヘン 執行役員 FAロボット事業部長 中川大輔)
このたび、我々の提案が採択されたことを大変光栄に存じます。当社のロボット技術やシステムインテグレーション分野での知見を活かし、多様なパートナーとともに現場ニーズに迅速かつ的確に対応できる技術基盤の開発を通じて、労働力不足等の重要な社会課題の解決に貢献してまいります。
(株式会社FingerVision 代表取締役社長 濃野友紀)
このたびは「ロボット利活用の起爆剤となるロボット開発基盤構築」という大儀の一翼を担うことができ、身の引き締まる想いでいます。当社は、ロボットハンドメーカーとSIerという2つの顔を併せ持ち、それぞれの立場から本事業に貢献していく覚悟でいます。ハンドは触覚機能を実装したユニークな製品であり、SIも従来、ロボット導入が難しかった領域への実装実績が多く、多面的に付加価値を出していきたいと思います。
(株式会社安川電機 上席執行役員 ロボット事業部長 岡久学)
本事業において当社は、お客さまの実現したい価値である「コト」の実現を目指し、ステークホルダーの皆様の知見とその活用を広げるエッジAI技術を提供します。多様なプレーヤーの参入を促す開発基盤の環境整備に参画することで、共創型エコシステムの形成を図ってまいります。
(ヤマハ発動機株式会社 ロボティクス事業部技術統括部長 今田将博)
このたび、私共の共同提案がNEDOに採択されましたことを大変光栄に思います。本事業のめざす「ロボットの導入・社会実装の拡大に資するオープン環境構築の実現」に向け、パートナーの皆さまと共創してまいります。当社は長期ビジョン ART for Human Possibilities を掲げています。 ARTのAは、“Advancing Robotics”を指し、基盤としての知的技術、ロボティクス技術を活用し進化させていくことを意味しています。この長期ビジョンに沿って、今後もロボティクス技術を活用し、社会課題の解決に向けてヤマハ発動機らしく挑戦を続けてまいります。
(ugo株式会社 代表取締役CEO 松井健)
当社はこれまで、点検・警備・案内業務などサービス分野を中心に数多くのロボットおよびプラットフォームの開発・導入実績を積み重ねてまいりました。現場導入を通じて培ったユーザビリティ改善の知見や、多様なシステム・機器とのインテグレーション効率化のノウハウを、本基盤開発に反映させることで、ロボット導入の裾野を広げ、深刻化する人材不足など社会課題の解決に貢献してまいります。
本件に関する問い合わせ先
- 川崎重工業株式会社 コーポレートコミュニケーション総括部 PR部 TEL:03-3435-2130- NTTビジネスソリューションズ株式会社 バリューデザイン部(原・藤森・土川)MAIL:cloud_robo@west.ntt.co.jp
- 株式会社ダイヘン 企画本部 経営企画部 TEL:06-7175-9580
- 株式会社FingerVision MAIL:contact@fingervision.jp TEL:080-5348-2167
- 株式会社安川電機 コーポレートブランディング本部 広報・IR部 TEL:093-588-3076
- ヤマハ発動機株式会社 コーポレートコミュニケーション部 広報グループ TEL:0538-32-1145
- ugo株式会社 広報担当 MAIL : pr@ugo.plus
ニュースリリースに記載している情報は、発表日時点のものです。
変更になる場合がありますので、あらかじめご了承いただくとともに、ご注意をお願いいたします。
◆会社概要
・社名: 株式会社FingerVision
・代表取締役: 濃野友紀
・開発拠点:
・東京都江東区東陽二丁目4番14号 三井ウッディビル1階
・京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・愛知県名古屋市中区丸の内2-17-13 NK丸の内ビル2F (★新設しました★)
・設立: 2021年10月
・URL: https://www.fingervision.jp/
・YouTube: https://www.youtube.com/channel/UCRgZuTJvDxjD_7ta03BRQFA
・LinkedIn: https://www.linkedin.com/company/fingervision/
・X/Twitter: https://twitter.com/Yuki_Nono_fv
・メール:contact@fingervision.jp
・ウェビナー(FingerVisionのロボット解説):https://tv.aperza.com/watch/2069
・テレビ出演:テレ東ブレイクスルー https://www.youtube.com/watch?v=xDapUJfuv_o
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できます。高機能(高分解能・マルチモダリティ)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。
企業プレスリリース詳細へ
PRTIMESトップへ