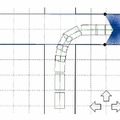
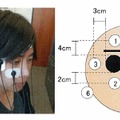
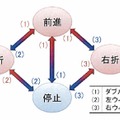
慶應義塾大学(理工学部システムデザイン工学科満倉靖恵准教授、高橋正樹准教授)の研究グループは23日、目の周りの電位“眼電位”によりコントロール可能な、安心・安全な車いす自動走行装置を開発したことを発表した。 安心・安全システムを目指した車いす設計をしていた高橋正樹准教授らのグループと、脳波や筋電の意味解析を中心に研究を行っていた満倉靖恵准教授らの新しいコラボレーションにより生まれた、世界初の技術とのこと。 脳波や筋電位、眼電位などの生体信号を用いた従来の車いすは、操作入力の精度、安全性・操作性、長時間使用や装着によるストレスなどが課題となり、実用化にいたっていない。また、まばたきは、一回の時間が0.2~0.4秒と短いことから、高精度かつ高速に検出できるが、ジョイスティックやハンドルのように連続的な入力を行うことができないため、車いすの操作には不向きとされていた。 これに対し、目の周りに装着した少数の電極から“眼電位”を計測し、3種類のまばたきを高精度に検出し、車いすの方向入力として応用する手法を開発。両目で瞬時に二度まばたきを行う「ダブルブリンク」、片目で行う左右の「ウインク」を用い、日常的に行う無意識的なまばたきと区別。前進したいときはダブルブリンクを行い、右左折したい時は右または左ウインクを行う。 さらに、通路や曲がり角などの環境情報を検出し、環境に応じて走行速度や旋回角を自動調節する制御機構を組み合わせた。左右の壁との距離、前方の交差点の有無、障害物の有無を車いすに搭載したセンサにより自動検出し、適切な走行速度や旋回角を計算し、安全な走行を可能にした。 今後は、眼電位計測機器や解析装置の小型化・低価格化に加え、より多くの環境に適応できる制御機構を導入することで、実用化を目指すとのこと。
 NHK近江アナ、翻訳家の関美和とリモート早慶戦!応援歌披露
NHK近江アナ、翻訳家の関美和とリモート早慶戦!応援歌披露